 ελληνικά
ελληνικά-
 English
English -
 Français
Français -
 日本語
日本語 -
 Deutsch
Deutsch -
 tiếng Việt
tiếng Việt -
 Italiano
Italiano -
 Nederlands
Nederlands -
 ภาษาไทย
ภาษาไทย -
 Polski
Polski -
 한국어
한국어 -
 Svenska
Svenska -
 magyar
magyar -
 Malay
Malay -
 বাংলা ভাষার
বাংলা ভাষার -
 Dansk
Dansk -
 Suomi
Suomi -
 हिन्दी
हिन्दी -
 Pilipino
Pilipino -
 Türkçe
Türkçe -
 Gaeilge
Gaeilge -
 العربية
العربية -
 Indonesia
Indonesia -
 Norsk
Norsk -
 تمل
تمل -
 český
český - ελληνικά
-
 український
український -
 Javanese
Javanese -
 فارسی
فارسی -
 தமிழ்
தமிழ் -
 తెలుగు
తెలుగు -
 नेपाली
नेपाली -
 Burmese
Burmese -
 български
български -
 ລາວ
ລາວ -
 Latine
Latine -
 Қазақша
Қазақша -
 Euskal
Euskal -
 Azərbaycan
Azərbaycan -
 Slovenský jazyk
Slovenský jazyk -
 Македонски
Македонски -
 Lietuvos
Lietuvos -
 Eesti Keel
Eesti Keel -
 Română
Română -
 Slovenski
Slovenski -
 मराठी
मराठी -
 Srpski језик
Srpski језик -
 Español
Español -
 Português
Português


Προϊόντα






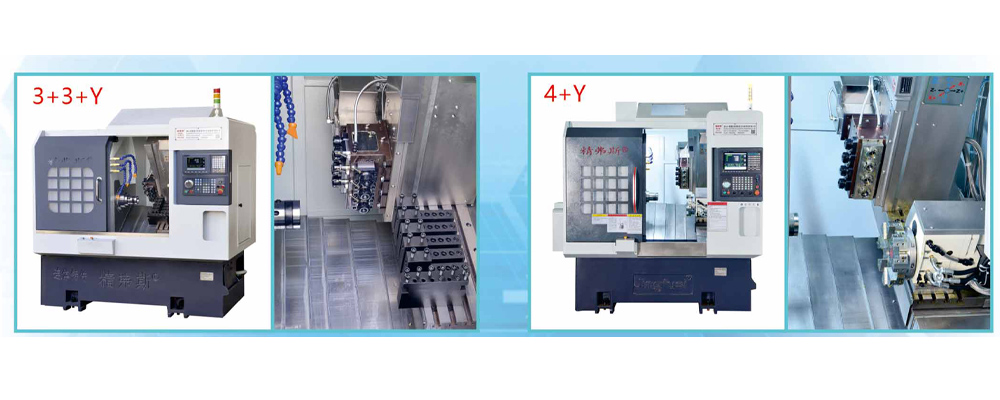
Μηχανή κατεργασίας στροφών
Το μηχάνημα μηχανικής κατεργασίας JingFusi® Turn-Mill είναι ιδιαίτερα κατάλληλη για μαζική παραγωγή εξαρτημάτων με σύνθετα σχήματα, όπως μικρο-εξαρτήματα, μικροδιανούς άξονες, ηλεκτρονικούς συνδετήρες, γυαλιά, ρολόγια και διάφορα αξεσουάρ υλικού.
Μοντέλο:CK52-5+5+Y
Αποστολή Ερώτησης
περιγραφή προϊόντος
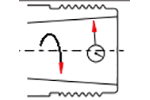
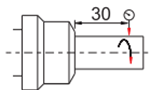
Η μηχανή μηχανικής κατεργασίας Turn-Mill έχει τα χαρακτηριστικά της υψηλής ακρίβειας και της υψηλής απόδοσης. Μπορεί να αλλάξει μεταξύ του δακτυλίου οδηγών και του μη οδηγού, να εκτελέσει την κατάλληλη επεξεργασία ανάλογα με το μήκος του τεμαχίου εργασίας και έχει μια λογική δομή. Και οι τρεις άξονες χρησιμοποιούν γραμμικούς οδηγούς κύλισης, οι οποίοι έχουν καλή αντίσταση φθοράς και υψηλή ακρίβεια. , που οδηγείται από έναν σερβοκινητήρα, η δομή γραμμικής σειράς εργαλείων έχει τα χαρακτηριστικά της ταχείας αλλαγής εργαλείων, το σύστημα CNC έχει πλήρεις λειτουργίες και είναι εύκολο να ελέγξει. Η επεξεργασία χωρίς μανίκια δεν απαιτεί υλικά λείανσης και μπορεί να επεξεργαστεί ράβδους με υψηλή ταχύτητα και υψηλή ακρίβεια και το ελάχιστο υπόλοιπο υλικό είναι μόνο 30mm. Η προαιρετική συσκευή επεξεργασίας πλευράς μπορεί να πραγματοποιήσει διεργασίες γεώτρησης και άλεσης.
Διάγραμμα ταξιδιού μηχανής
Λεπτομέρειες προϊόντος

Λίστα παραμέτρων
| είδος | περιεχόμενο | μονάδα | CK46-5+5+y | CK52-5+5+y |
| Πεδίο επεξεργασίας | Κοιτάζω πάνω από το κρεβάτι | mm | Ø 500 | |
| Μέγιστο μήκος του εξωτερικού κύκλου στροφής | mm | 320 | ||
|
Μέγιστη διάμετρο ράβδου |
mm | Ø 45 | Ø 51 ~ 55 | |
| κύριος άξονας | Μέγιστη ταχύτητα ατράκτου | r/min | 6000 (ρυθμίστε σε 4000) | 4500 (ρυθμίστε σε 3500) |
| Τύπος κεφαλής άτρακτου |
|
A2-5 | A2-6 | |
| Διάμετρος μεταξύ των οπών | mm | Ø 56 | Ø 66 | |
| τροφή | X/z/y άξονα μέγιστου εγκεφαλικού επεισοδίου | mm | 800/470/310 | |
| Μέγιστη γρήγορη κίνηση του άξονα x/z/y | m/my | 24 (Ρύθμιση 18)/24 (Ρύθμιση 18)/15 (Ρύθμιση 8) | ||
| X/z/y βίδα άξονα | mm | 32/32/25 | ||
| X/z/y rail axis | mm | 35/35/25 | ||
| Πύργος μαχαιριού | Οκτώ πυργίσκο σταθμού | Υπολογιστές | 8 σταθμοί, μπορούν να είναι εξοπλισμένοι με κατόχους εργαλείων διπλής οπής, προαιρετικά με 12 σταθμούς | |
| Κεφαλή εξουσίας | Φόρμα συγκράτησης εργαλείων κεφαλής τροφοδοσίας |
|
ER25 | |
| Μέγιστη ταχύτητα κεφαλής ισχύος | r/min | 6000 (που έχει οριστεί σε 4000), μπορεί να χρησιμοποιηθεί συνήθως για την επεξεργασία προϊόντων από 4000 | ||
| Μέγιστη διάτρηση γεώτρησης εγκατάστασης και φρεζάρισμα | mm | Ø 16 | ||
| Απόσταση μεταξύ του άξονα κεφαλής ισχύος και του άξονα | mm | 65 | ||
| ηλεκτρικά μηχανήματα | Κύριος κινητήρας/ροπής | KW / nm | 7.5 kW/47.75nm, προαιρετικά 11kW/70.03nm για χάλυβα με χωρητικότητα επεξεργασίας 80 και άνω | |
| X/z/y axis axis power/ροπή ροπής | KW / nm | Yaskawa 1.8kW/11.5nm. Προαιρετική νέα γενιά 2.4 kW/βαθμολογία 11.5nm | ||
| X/Z Power Head Motor Power/ροπή | KW / nm | 2.4 kW/11.5nm | ||
| Μέγιστη ταχύτητα κινητήρα κεφαλής ισχύος | r/min | 5000 | ||
| άλλος | Συσκευή φρένου τοποθέτησης άξονα |
|
υδραυλική πίεση | |
| Κλίση | ° | 35 ° | ||
| Μήκος πλάκας τραπέζι μαχαιριού x πλάτος | mm | 700x290 | ||
| Μήκος εργαλείων Μήκος x πλάτος x ύψος | mm | 2200x1580x2000 | ||
| Συνολικό βάρος ολόκληρου του μηχανήματος | Κιλά | 3430 | ||
| Συνολική ισχύς | kW | 13 | ||
| Μέση κατανάλωση ενέργειας | KW / h | 2 | ||
Ακρίβεια εργαλείου
| Ακρίβεια μηχανής, πρότυπο παράγοντα Jingfus: | ||||||||
| Σημαντικό στοιχείο δοκιμής | Σχηματικό διάγραμμα | Εργοστασιακό πρότυπο | ||||||
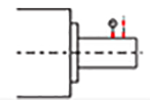
| Ακτινικός ρυθμός άξονα |

|
Ανίχνευση εκκένωσης του εξωτερικού κώνου | 0.0035 | |||||
| Χ-άξονας επαναλαμβανόμενη θέση |
|
Ανίχνευση επαναλαμβανόμενης τοποθέτησης του άξονα x. ΣΗΜΕΙΩΣΗ: Πρώτα προβλέψτε περίπου 50 φορές για να αντισταθμίσετε το σφάλμα του ψυχρού κινητήρα και στον καυτό κινητήρα και στη συνέχεια να ανιχνεύσετε την επαναλαμβανόμενη τοποθέτηση. | 0.003 | |||||
| Z-άξονα επαναλαμβανόμενη θέση |
 |
Ανίχνευση επαναλαμβανόμενης τοποθέτησης στον άξονα z. ΣΗΜΕΙΩΣΗ: Πρώτα προβλέψτε περίπου 50 φορές για να αντισταθμίσετε το σφάλμα του ψυχρού κινητήρα και στον καυτό κινητήρα και στη συνέχεια να ανιχνεύσετε την επαναλαμβανόμενη τοποθέτηση. | 0.003 | |||||
| Θέση επανάληψης του άξονα y |

|
Ανίχνευση επαναλαμβανόμενης τοποθέτησης στον άξονα y. ΣΗΜΕΙΩΣΗ: Πρώτα προβλέψτε περίπου 50 φορές για να αντισταθμίσετε το σφάλμα του ψυχρού κινητήρα και στον καυτό κινητήρα και στη συνέχεια να ανιχνεύσετε την επαναλαμβανόμενη τοποθέτηση. | 0.004 | |||||
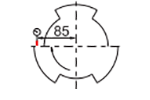
| C Επαναλάβετε τη θέση του άξονα C |
|
Ανίχνευση της επανατοποθέτησης του σταθερού σημείου του άξονα C, Σημείωση: Πρώτα προβλέψτε περίπου 50 φορές για να αντισταθμίσετε το σφάλμα του ψυχρού κινητήρα και στον καυτό κινητήρα και στη συνέχεια να ανιχνεύσετε την επαναλαμβανόμενη τοποθέτηση | 20 δευτερόλεπτα | |||||
| C Ρόταρυ του άξονα C |

|
Ανίχνευση της ακρίβειας τυχαίας θέσης του άξονα C, Σημείωση: Πρώτα προβλέψτε περίπου 50 φορές για να αντισταθμίσετε το σφάλμα του ψυχρού κινητήρα και του καυτού κινητήρα και στη συνέχεια ελέγξτε τις επαναλαμβανόμενες ρυθμίσεις | 72 ARC δευτερόλεπτα | |||||
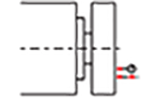
| Beat Head Head Clamping Beat |
|
Κώνος κώνου | 0.015 | |||||
| Beat Head Head Clamping Beat |
 |
Σφίγγοντας ξυλοδαρμό | 0.01 | |||||
| Εάν ο πελάτης επιθυμεί να δοκιμάσει την ακρίβεια ISO ή VD1 του άξονα X/Z/Y, θα καθοριστεί κατά τη στιγμή της σύνταξης της σύμβασης. Ο πελάτης πρέπει να δοκιμάσει αυτό το στοιχείο ταυτόχρονα της αρχικής αποδοχής του εργοστασίου Jingfusi. | ||||||||
Hot Tags: Μηχανή επεξεργασίας στροφών, Κίνα, κατασκευαστές, προμηθευτές, εργοστάσιο, ποιότητα, τιμοκατάλογος
Αποστολή Ερώτησης
Μη διστάσετε να δώσετε το ερώτημά σας στην παρακάτω φόρμα. Θα σας απαντήσουμε σε 24 ώρες.








X
Χρησιμοποιούμε cookies για να σας προσφέρουμε καλύτερη εμπειρία περιήγησης, να αναλύσουμε την επισκεψιμότητα του ιστότοπου και να εξατομικεύσουμε το περιεχόμενο. Χρησιμοποιώντας αυτόν τον ιστότοπο, συμφωνείτε με τη χρήση των cookies από εμάς.
Πολιτική Απορρήτου